![]()
來源:軍鷹資訊
任務規劃是作戰指揮及控制的核心,特別是隨著聯合作戰理念的提出與深入,任務規劃技術作為傳統手段與新興技術的最佳結合點,正逐步成為解決未來智能化戰爭的關鍵所在.為了能充分利用該領域內已有的成熟技術成果,并開展更深入的探索,詳細分析了任務規劃技術的發展現狀以及技術路線,對未來的研究方向作了展望.
任務規劃(Mission
Planning)軍事領域的正式定義在《中國人民解放軍軍語》、《中國人民解放軍空軍軍語》和《美軍軍語及相關術語詞典》里沒有明確的定義和解釋.國內有學者認為任務規劃是一項基于可信的模型和數據,按照標準化作業流程,對作戰要素進行全面分析,實現優化配置各類作戰資源,整體協調各類兵力兵器的行動計劃,可根據戰場態勢的變化進行實時動態調整,確保以最優或近似最優的方法達成作戰目標的作戰指揮決策活動,是C4ISR系統的一項重要功能[1];也有學者認為任務規劃是圍繞任務目標制定\優化作戰方案的一種思維活動過程[2].
目前軍事界和理論界對任務規劃還未形成比較統一的認識.筆者經過對各種任務規劃定義的綜合分析,給出任務規劃在武器裝備領域的一般定義:任務規劃是將武器裝備、戰場環境和人系統映射到統一的數學空間,運用數學工具和現代計算技術,在武器裝備性能和作戰規則約束下,按照戰術意圖對武器裝備的使用進行籌劃,使各作戰要素以統一的目標、統一的計劃,有序、協調行動的一門綜合學科.任務規劃本質上是以運籌和優化的方法和思想,統籌資源、完成任務.任務規劃技術是一項多領域相關、多層面運用、多學科交叉、多技術融合、多系統集成以及人機、腦機交互的高新技術.任務規劃技術橫向可聯通傳統技術手段、縱向可融合新興技術理念,形成傳統手段與新興技術的最佳結合點.進化算法、知識/規則庫、分布式協同、機器學習、人工智能、大數據、云計算、AR/VR、腦機結合等新技術、新理念都已經或即將在任務規劃技術中得到應用.
未來,任務規劃技術隨著現代智能技術的發展,將進入蓬勃發展的新時期.任務規劃技術可利用知識/規則庫、大數據、云計算、人工智能等新技術進行戰場態勢智能分析與預測,獲取敵情信息、我情信息和戰場環境信息,包括部隊部署、作戰態勢、活動規律等信息,對獲取的戰場數據加以智能分析和數據挖掘,從中挖掘出深層次的信息和特征,為決策提供支撐[3].實質上,在新技術的引領下從海量化的知識到精確化的決策正成為當前任務規劃技術的最新計算范式,任務規劃技術是實現戰場知識、信息或數據“增值”的核心手段.任務規劃技術融合新的技術手段可迅速提升智能決策的水平,推動傳統作戰向智能戰爭實現跨越.人工智能是任務規劃技術發展的新引擎,正在重構影響軍事作戰過程的各環節,知識、信息、數據是這個引擎的原始燃料,例如通過數據挖掘尋找戰場的未來走向、通過大數據分析海量數據內在的聯系、通過機器學習預測未來對手的行動等.如圖1所示.
圖1 任務規劃技術是實現戰場知識、
信息或數據“增值”的核心手段
任務規劃起源于高技術信息化武器裝備的特殊使用需求,目前在主要軍事強國廣泛研制和使用.自1991年海灣戰爭以來,以戰斧巡航導彈為代表的高新技術武器裝備在美國歷次發動的高技術局部戰爭中得到了廣泛應用,取得了顯著的作戰效果,作為大腦,任務規劃是武器系統發揮其作戰效能的重要保證[4?6].國內任務規劃技術經過多年的發展,取得了長足進步,尤其以軍用任務規劃技術發展最為迅速,需求也最為迫切.
1.1 任務規劃技術發展及路線分析
在軍事領域,任務規劃技術由于巡航導彈的迫切需求應運而生,時至今日已初步發展為技術系列齊全、標準體系完備、內涵外延豐富的多層次技術群.以運籌學、控制理論、優化算法、人工智能等數學和計算機科學相關理論為代表的一系列理論,為任務規劃提供了有力的理論支撐;任務規劃應用研究的主要目的是為具體任務規劃問題提供模型、算法,形成支撐工程實現的技術方法;任務規劃技術研究的最終目標是研制相關任務規劃產品,當應用研究逐步走向成熟后通過工程實現直接支撐任務規劃產品實現.
根據參與研究的主體、成果應用的方向、面向的背景需求不同,任務規劃技術的發展主線可劃分為理論探索、應用研究、工程實現3個層次,發展各有側重,最終目的均為任務系統的產品實現提供具體支撐,如圖2所示.
1.1.1 理論探索層次
任務規劃相關理論發展主要經歷了3個階段,第1階段以軍事運籌學、控制理論等相關理論為基礎,主要目標是實現輔助計算;第2階段以專家系統、智能優化等相關理論為基礎,主要目標是實現輔助決策,降低人的工作負荷;第3階段以深度學習、數據挖掘等人工智能領域的最新理論成果為基礎,主要目標是實現決策的自主化和智能化.
運籌學與軍事行業密不可分,運籌學誕生于第二次世界大戰初期,用來解決稀少戰爭資源更有效分配的問題[7].國內軍事運籌學研究開展較早,1958年,錢學森教授在國防部第五研究所成立作戰研究處,翻譯蘇聯和美國的相關專著;1984年我軍成立軍事運籌學學會;1990年軍事運籌學正式列為軍事學二級學科[6].作為較早研究軍事問題定量分析和決策優化的理論,其線性規劃[7]、動態規劃、整數規劃[8?9]等理論廣泛應用到任務規劃系統的研究中.與任務規劃相關的控制理論首先是飛行器控制相關理論,早期在巡航導彈和戰斗機的任務規劃系統中得到應用,經過幾十年的發展,國內在飛行器控制領域已經取得了豐碩成果,以北京航空航天大學、南京航空航天大學和航天科技集團、航天科工集團、國防科技大學等相關高校和科研院所為代表;隨著無人飛行器,尤其是微小型無人飛行器在軍事領域的廣泛使用,以一致性理論[10?11]為代表的多機協同控制理論必將在任務規劃系統中得到更廣泛的應用.
專家系統是人工智能領域的早期成果,其以規則的形式表達領域專家的知識,采用推理機對當前事實進行推理,在某一個狹窄領域獲得與領域專家相似的能力[12],是任務規劃系統實現自主決策的重要理論支撐.從20世紀80年代至今,在工業經濟、農業基礎科學、航空航天科學與工程、武器工業與軍事技術等相關應用領域發表了大量研究文章,在任務規劃領域主要用于構建指揮決策模型,提高任務規劃系統的自主化水平.
當前,以深度學習、數據挖掘等理論為代表的人工智能方興未艾,其對任務規劃技術的推動毋庸置疑,未來任務規劃技術必將結合人工智能領域的最新成果.從淺層計算到深度神經推理、從單純依賴于數據驅動的模型到數據驅動與知識引導相結合學習、從領域任務驅動智能到更為通用條件下的強人工智能(從經驗中學習)、人工智能、大數據等技術改變了計算本身,也促使任務規劃技術從自主化進一步向智能化發展.
任務規劃技術在理論探索層的發展脈絡,如圖3所示.
1.1.2 應用研究層次
應用研究是理論成果與工程實現的紐帶與橋梁,近年來隨著基礎理論的發展和國內軍事應用領域對任務規劃系統需求的不斷提高,大量高校、科研單位的研究人員積極參與到任務規劃應用研究當中.關于任務規劃技術的研究最早主要集中在飛行器的任務規劃領域,包括飛行器任務分配[11?14]、航路規劃[15?16]、載荷規劃等,并逐漸從單飛行器規劃到多飛行器協同規劃,從飛行器規劃擴展到陸[17]、海、天等多領域平臺規劃,從單武器裝備規劃到多武器平臺協同規劃.
基于面向作戰應用的任務規劃技術主要解決4個域的實際問題:路徑域、目標域、預演域、終段域.在路徑域含任務分配、航跡規劃問題;目標域含目標分析、毀傷計算、突防分析問題;預演域含仿真推演、攻防對抗問題;終段域含遠程管控、效能評估問題.
以路徑域為例,對于路徑域的任務分配技術,首先出現的是基于線性規劃和整數規劃的任務分配方法[18],隨著智能優化算法的發展,合同網絡[13,19]、蟻群算法[20]、遺傳算法[21]等一系列智能優化算法被用來解決任務分配問題.對于路徑域的航跡規劃技術,基于Voronoi圖的路徑規劃方法、基于共同進化的規劃方法等,基本屬于數學規劃方法層面,后逐步演變為一般優化算法、啟發式優化算法、決策樹模型等.
其典型技術發展路線圖如圖4所示.
隨著深度神經網絡模型、云計算的發展,任務規劃技術逐漸吸納這類模型進行復雜問題的求解,對武器裝備作戰中的毀傷、突防、目標分析、推演、評估、管控等工程問題的解決起到巨大的推動作用.
國內在開展任務規劃應用研究的同時,也形成了開放、共享、合作的良好學術交流環境.2009年,我國首屆飛行器任務規劃技術學術研討會召開;2011年,中國宇航學會任務規劃三級分會成立,第二屆任務規劃學術研討會召開;2016年,中國宇航學會批復成立任務規劃二級分會,為國內任務規劃研究機構和人員深入開展學術交流與合作搭建了良好的平臺.
1.1.3 工程實現層次
任務規劃技術在巡航導彈領域得到首次工程實現,近些年隨著新型戰機、無人機、艦船等高新裝備的發展,其配套的任務規劃系統也紛紛開始研制.經過多年的發展,實現了從單武器到多軍兵種聯合、射前預案規劃到全程作戰籌劃控制的跨越,構建了相對完整的任務規劃技術工程應用體系[22].從工程實踐經驗角度來看,任務規劃技術工程化的特點是“基礎在平臺、核心是模型、關鍵是數據”.平臺的重點是滿足網絡化、服務化、國產化、自主可控的需求,模型重點是通用化,且支持多領域模型快速積累和復用,數據的重點是種類完備且具有標準的數據保障規范體系[23].
根據裝備的發展與作戰的體系化變革歷程,任務規劃技術在該層次可以歸納為4個主要的階段,即:單型武器任務規劃技術、裝備平臺任務規劃技術、合同作戰任務規劃技術、聯合作戰任務規劃技術.國內主要以工業部門為研究主力,如中國航天科工集團、中國航天科技集團、中國電子科技集團等.工業部門以型號研制為牽引,逐漸發展成為一個完整的研發體系,如航天三院在國內構建了由研發平臺、模型體系、數據工程組成的任務規劃工程研發體系,為任務規劃系統研制和任務規劃技術驗證創造了條件.研制出我國第一型通用任務規劃平臺(CMPE);首創通用任務規劃建模語言MPDL,構建了覆蓋各領域裝備的性能/效能/戰術模型體系;建立從數據需求、保障渠道、交換格式、校驗方法,到管理分發途徑的完整數據工程解決方案.我國在任務規劃工程實現層技術能力的發展路線如圖5所示.
1.2 國內外任務規劃技術發展對比分析
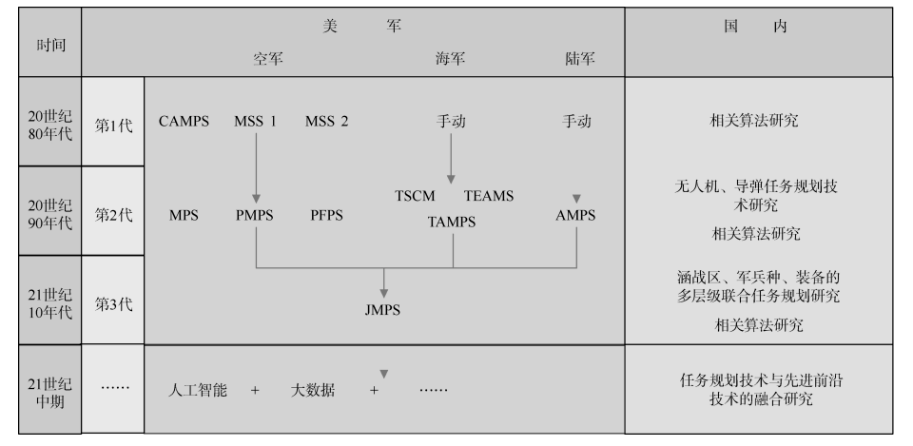
自20世紀80年代以來,世界各國紛紛開展了任務規劃技術的研究.以美軍為代表的西方國家最早開展任務規劃的研究、研制和應用,在世界處于領先地位[24?25],其陸海空三軍都分別裝備有不同的任務規劃系統[26],從系統層面美軍與國內的發展對比如圖6所示.
進入新世紀以來,發達國家對軍事領域的任務規劃技術提到了新的
高度.美軍重視新技術背景下對智能化任務規劃技術的探索.來自南加州大學的研究人員設計了虛擬指揮體系,作戰人員可以在充滿各類作戰信息的虛擬指揮中心內指揮作戰,甚至可在虛擬體系中直接實現對作戰平臺的操控.目前主要軍事強國均對人工智能等先進技術在任務規劃領域的應用產生了強烈興趣.美國國防部于2017年透露,其已建立整合利用大數據和機器學習能力的職能團隊[27?28].
與發達國家相比,國內任務規劃相關技術還有很大的進步空間[2].在分析研究我軍軍事任務規劃需求的基礎上,對標國際拓展研究思路,以理論研究為指導,完善配套模型、數據、標準等,未來可重點開展聯合任務規劃體系框架、功能使用、運行機理等系統研究與應用.同時在面對人工智能這一全球共同的機遇時,任務規劃技術成為支撐人工智能轉化為軍事“超級智能”的關鍵,人工智能對任務規劃技術的顛覆性潛力正逐步顯現.

圖5 任務規劃技術的工程實現層發展歷程
在未來作戰智能化、信息化的大背景之下,國內大力發展相關高新技術武器裝備和指揮體系,任務規劃技術的研究進入了空前繁榮階段,任務規劃技術經歷了從離線預案式規劃向在線響應式規劃、智能預測式規劃的跨越式轉變,未來將會有更多的新技術、新理念與任務規劃技術相結合以支撐智能化戰場條件下的軍事作戰輔助決策.基于網絡信息體系的互聯互通能力,將體系仿真技術融入到任務規劃技術中,在與指揮控制和情報保障無縫接駁的基礎上,基于最新態勢和目標進行超實時仿真分析與效能評估,“預測”戰爭走勢,“透視”戰場未來變化,實現體系作戰過程中動態、靈活的作戰資源配置和作戰行動方案的不斷優化調整,將信息優勢轉化為決策優勢與行動優勢,任務規劃技術在未來將扮演“戰爭設計者”的角色.
2.1 新時期任務規劃技術面臨新的需求
現階段以人為核心的態勢判斷和火力籌劃等為代表的常用任務規劃技術無法適應未來高對抗戰場作戰下的智能作戰,迫切需要自主化任務規劃技術的支撐來發揮武器系統最大作戰效能.任務規劃系統要實時判斷,依據敵方兵力、火力,我方的武器數量、位置、戰斗部類型等,快速做出打擊或規避的決策,并生成各個作戰單元可執行的規劃策略,為指揮員提供決策智力支持.同時高效、準確的仿真推演技術可以驗證決策成果在模擬真實戰場中的效果,支撐決策成果的實時調整需求.
目前,大多數的任務規劃系統采用人工判讀和決策模式,大大加重了指揮員的認知負荷,態勢越復雜,作戰單元越多,越難做出快速正確的決策,且僅僅依靠指揮員的先驗知識,往往很難做出最優的選擇,并存在諸多不可控的人為因素[29].戰場態勢和環境的瞬息萬變,迫切需要在線群體智能決策技術的支撐來降低保障需求和提升自主能力.面對敵方目標活動范圍廣、機動性強等特點,事先很難獲取準確的目標信息,而發射后管控也很可能面臨干擾或致盲而阻斷.因此,防御環節的層次性、對抗環境的激烈性以及信息保障的困難性、信息鏈路的脆弱性等現實問題,是新時期任務規劃技術將面臨的重要問題[30].
“無處不在”的人工智能使我們隱約地看到未來任務規劃技術將以新的姿態為我們服務.面對這一艱巨的科學目標,我們還需要應對以下多個挑戰,如何讓機器像人類一樣感知和理解世界;如何使機器具有自我意識、情感以及反思自身處境與行為的能力等.如同遺傳學的發展,人工智能亦是一把雙刃劍,伴隨技術的深刻變革,任務規劃技術過度依賴人工智能也會帶來倫理道德問題,我們需要的是“幫助我們解決問題的智能任務規劃技術而不是替代我們決策的智能任務規劃技術”.
2.2 任務規劃技術重點發展方向及展望
現如今任務規劃系統和現代技術都取得了突飛猛進的發展,任務規劃系統和現代技術的融合將成為研究人員未來研究的主要方向.當前技術發展環境下,任務規劃技術面向聯合作戰戰場應用,其發展正逐步呈現出以下特征:一是云計算、大數據、服務化等互聯網信息技術的大量應用,將使任務規劃在多層級部署、功能服務化、數據模型建設、計算效率大幅提升等方面有了堅實發展基礎;二是高帶寬、高可靠性的通信技術日新月異,將有力推動戰前階段的預案規劃向著作戰階段的動態規劃發展;三是高性能嵌入式計算設備和人工智能技術的突飛猛進,將促進任務規劃向著武器裝備作戰過程中的自主規劃、群體智能規劃方向發展[31?32].
在研究各種任務規劃方法的基礎上,通過多學科的交叉并將人工智能、虛體空間理念、智能人機接口、智能決策理論、智能化仿真推演以及建模與優化等先進理念/技術廣泛地融合到任務規劃技術中,使任務規劃技術能適應快速發展的智能戰場軍事需求.未來實戰化的仿真推演和游戲化的模擬訓練是任務規劃技術逐步走向成熟的關鍵途徑,同時逐步建立健全的面向智能作戰的任務規劃體系,將從根本上應對任務規劃技術創新性不足的難題.對于未來任務規劃技術的重點發展方向以及與先進技術的融合趨勢,筆者認為任務規劃技術的融合邊界沒有確定范圍,即大多數先進信息化技術都可以在一定程度上找到與任務規劃相契合的點,本文選取幾個目前較為成熟的技術方向進行簡要論述.
2.2.1 面向智能作戰的任務規劃體系
在新時代,智能戰爭的需求背景下,完善、健全的任務規劃體系是釋放出“智能紅利”的關鍵.不同于以往,未來任務規劃體系應突出其面向應用的特點,同時也要適應我軍新的作戰指揮制度建設的步伐.構建完善的面向智能作戰的任務規劃體系是未來任務規劃技術發展的核心任務,其主要內容包括:完善體系的共性支撐、豐富體系的實踐應用、深挖體系的關鍵技術.
完善面向智能作戰的任務規劃體系是為推進任務規劃發展模式從“跟蹤研發”為主向“自主創新”轉變.依托任務規劃體系支撐層完善對平臺、模型和數據的構建,提升快速研發能力、滲透集約化研發理念;依托任務規劃體系應用層完善對多層級一體化運用能力的實現,分層構建涵蓋軍委–戰區–軍種–武器的多級智慧決策體系,體現智能規劃、精準規劃的技術內涵;依托任務規劃體系完善技術層對技術體制、總體架構、核心技術的深度挖掘,構建“云+網+端”的靈活使用環境,滿足網絡動態、高效互聯,技術體制通用、展現形式靈活的需求,其任務規劃體系理念構想如圖7所示.
2.2.2 新一代智能規劃技術
新一代智能規劃技術最大的特點在于對人工智能及大數據的運用,是任務規劃技術發展的一個巨大跨越.該技術提高特定任務中的數據計算準確性、緩解指揮系統中指揮員的決策壓力;未來通過開發更高效的語言處理系統,可讓機器基于任務規劃系統更好的執行人類的命令,提高任務規劃系統的可信度[33?34].如圖8、圖9所示,新一代智能規劃技術已應用于軍隊.
深度學習的發展是人工智能技術進步的關鍵,在人工智能的支撐下,新一代智能規劃技術首次超越人類表現的主要里程碑包括:國際象棋(1997年)、trivia(2011年)、Atari游戲(2013年)、圖像識別(2015年)、語音識別(2015年)、和Alpha
Go圍棋(2016 年)[35?39].
作戰不同于下棋,沒有經驗棋譜和真實數據可循,因此,基于傳統知識的學習將難以適應智能戰爭的發展,以AlphaGo
Zero為代表的智能博弈為實戰運用與任務規劃的耦合式發展帶來了新曙光.博弈對抗是人工智能發展的新方向,通過機機對抗系統可以實現對抗數據收集整理,為下一步知識和數據混合驅動的博弈推理學習訓練奠定基礎[40?41].
2.2.3 基于仿真推演的任務規劃技術
基于任務規劃技術形成的方案決策結果需在敵我對抗的動態博弈中不斷更新調整.仿真推演技術可提供真實戰場的模擬環境、預測戰局走向,將任務規劃與仿真推演相結合能夠實時檢驗方案決策結果的準確性,如圖10所示.仿真推演與任務規劃深度融合構建閉環聯合作戰體系是未來任務規劃技術發展的重要方向之一.
現代戰爭是體系與體系的對抗,大量戰場要素在不斷隨交戰過程演進、變化,使得交戰過程存在復雜的不確定性.作戰裝備體系執行初期制定的作戰計劃將很難達到預定的目標、難以適應戰場的最新態勢.仿真推演與任務規劃深度融合可拓寬其在未來智能戰場的應用范圍,并在3個層次支撐閉環聯合作戰體系的構建,即:輔助結果優選、支持敵我博弈、支撐自我博弈,如圖11所示.
圖9 美軍人工智能領域智能決策與任務規劃結合應用于軍隊
圖10 將仿真推演與任務規劃融合構建閉環聯合作戰體系
仿真推演技術可以在結果優選方面支持任務規劃進行定量化結果評估.對裝備體系作戰任務的仿真分析要求將仿真放在動態、復雜多變的戰場中進行,傳統依賴靜態態勢、任務數據的作戰任務評估仿真模式,往往無法反映瞬息萬變的戰場態勢,其分析有效性將大打折扣.面向未知的智能化戰場,任務規劃技術需提前預知敵方行動并實時調整我方規劃結果,多分枝仿真技術可提供支撐“透視戰場”的能力.
仿真推演技術可以在敵我博弈方面支持任務規劃進行智能化行動預測.對復雜的體系化交戰過程而言,復雜、耦合的戰場要素模型結構,大量的不確定性以及不完善的理論和先驗知識,極大程度上影響了對體系作戰仿真的正確性,及基于此類應用進行作戰任務分析的正確性,難以真正實現對敵方未來行動的準確模擬.智能化仿真推演將定式化模擬敵方行動提升至自主化預測敵方行動層面,面向敵我博弈的仿真推演技術可以為我方行動進行預警,提升作戰決策的動態規劃能力,為我方的體系化作戰能力構建、敵我雙方的體系化對抗能力生成提供技術支撐.
圖11 仿真推演多層次支撐任務規劃技術能力的提升
仿真推演技術可以在自我博弈方面支持任務規劃進行大樣本數據積累.任務規劃與仿真推演相結合的高階應用是智能化戰場自我博弈的實現,智能化的自我博弈可解決戰場復雜體系對抗過程的動態性、不確定性及戰場要素機理不完備性等問題.未來智能化戰場的自我博弈是機器之間進行對抗,在沒有固定數據樣本的情況下生成大量隨機樣本,為后續的機器學習提供數據、知識,訓練出新的戰場模型、戰術戰法等,同時戰場自我博弈可以使敵方模型訓練的更為逼真,為準確的任務規劃奠定模型基礎.基于仿真推演的任務規劃技術可為面向體系化作戰的裝備體系提供智能規劃、作戰仿真、任務評估能力,分析裝備在智能戰場、體系作戰中的貢獻度問題.
2.2.4 先進人機交互技術
面向任務規劃領域的先進人機交互重點依托虛擬現實和增強現實技術.
虛擬現實技術產生于20世紀60年代,目前在任務規劃領域最主要的應用是結合單兵實戰或模擬訓練,通過其對計算機圖形技術、多媒體技術、傳感器技術、人機交互技術、網絡技術、立體顯示技術以及仿真技術等多種技術的集成,以成本低、逼真度高的特點,最大程度地代替實戰訓練,提升軍隊戰斗力,節省軍費開支,縮短武器的研制周期如圖12、圖13所示.
圖15 頭盔套裝(Helmet Kit)和增強現實處理器CARP
增強現實技術是一種將計算機生成的虛擬物體、場景、提示信息等實時疊加到真實場景中的技術.通過將增強現實與任務規劃技術的融合,在聯合作戰指揮系統中,使用增強現實數字化系統傳輸指令,比使用模擬通信系統更為準確,更有利于下級正確理解上級意圖,同時作戰指揮人員也能隨時隨地掌握每一個作戰單元的情況.如圖14、圖15所示.
本文梳理了任務規劃技術的發展脈絡及現狀,并在此基礎上與國外先進任務規劃技術及理念進行了對比分析,然后重點分析未來任務規劃技術發展面臨的核心問題,展望了發展的重要方向.伴隨著科技的飛速發展,在新的全球環境與形勢下,高精尖技術與概念層出不窮,作為軍事作戰與指揮核心大腦的任務規劃技術能否緊跟時代潮流,直接關系著未來智能化戰場我軍能否占據主動地位.
任務規劃技術是現代信息技術發展的產物,是貫徹落實聯合作戰條件下“提高精確感知、精確指揮、精確打擊、精確評估、精確保障能力”的抓手,在未來信息化戰爭中具有重要的軍事價值和廣闊的應用前景,其研究成果對推動國民經濟的發展和國防力量的建設具有極為重要的意義.此外,隨著科技的不斷進步、需求的不斷提升,以及各種新理論、新方法的涌現為該領域注入了源源不斷的動力,使其研究的范圍越來越廣,研究的對象越來越復雜,研究的內容越來越深化,研究過程與實際應用的結合越來越緊密.
References
1 成茂榮,藺衛,羅金亮,等.信息化條件下空中作戰任務規劃問題研究[J].飛航導彈,2015(9):61?64.
2 王玥,張克,孫鑫.無人飛行器任務規劃技術[M].北京:國防工業出版社,2015.
3 陳嬌葉,羅衛兵,楊欽訶.美國無人系統發展重點及趨勢分析[J].飛航導彈,2012(11):35?37.
4 關世義,孫華.飛航導彈任務規劃技術的回顧與展望[C]//首屆中國飛行器任務規劃技術學術研討會論文集,2009:1?5.
5 HILLIER F S.Introduction to operations research[M].New York:Tata McGraw-Hill Education,2012.
6 邵國培,徐學文,劉奇志,等.軍事運籌學的過去、現在和未來[J].運籌學學報,2013(1):10?16.
7 李大東,孫秀霞,孫彪,等.基于混合整數線性規劃的無人機任務規劃[J].飛行力學,2010(5):88?91.
8 葉媛媛,閔春平,朱華勇,等.基于整數規劃的多UCAV任務分配問題研究[J].信息與控制,2005(5):38?42.
9 李華偉.多無人機協同任務規劃研究與實現[D].西安:西安電子科技大學,2014.
10 周峰.多自主體系統分布式一致性跟蹤控制研究[D].北京:北京理工大學,2015.
11 張慶杰.基于一致性理論的多UAV分布式協同控制與狀態估計方法[D].長沙:國防科學技術大學,2011.
12 MICHAEL N.Arti fi cial intelligence a guide to intelligent systems[Z].Harlow:Addison Wesley,2005.
13 龍濤,朱華勇,沈林成.多UCAV協同中基于協商的分布式任務分配研究[J].宇航學報,2006(3):457?462.
14 龍國慶,祝小平,周洲.多無人機系統協同多任務分配模型與仿真[J].飛行力學,2011(4):68?71.
15 李季,孫秀霞.基于改進A-Star算法的無人機航跡規劃算法研究[J].兵工學報,2008,29(7):788?792.
16 宋建梅,李侃.基于A~*算法的遠程導彈三維航跡規劃算法[J].北京理工大學學報,2007(7):613?617.
17 柳林.多機器人系統任務分配及編隊控制研究[D].長沙:國防科學技術大學,2006.
18 田松,晁愛農,毛紅保.無人機任務規劃[M].北京:國防工業出版社,2011.
19 郝莉莉,顧浩,楊惠珍,等.Simulink/State fl ow的AUV群體協作合同網快速原型仿真[J].火力與指揮控制,2013,38(2):26?30.
20 蘇菲.動態環境下多UCAV分布式在線協同任務規劃技術研究[D].長沙:國防科學技術大學,2013.
21 肖支才,程春華.基于改進遺傳算法的反艦導彈協同任務規劃[J].計算機與數字工程,2010,38(5):22?24,41.
22 何煦虹.飛航導彈任務規劃系統的現狀及發展趨勢[J].飛航導彈,2009(5):15?18.
23 邢立寧,陳英武.任務規劃系統研究綜述[J].火力與指揮控制,2006,31(4):1?4.
24 張繼春,吳偉澤.美國陸軍數字化部隊研究現狀和發展趨勢[J].艦船電子工程,2013,33(3):7?8.
25 周其忠,史曉麗,郭洪文,等.任務規劃技術在裝備綜合保障中應用探討[J].戰術導彈技術,2014(6):64-68.
26
DIONNE D,RABBATH C A.Multi-UAV decentralized task allocation with
intermittent communications:the DTC algorithm[C]//American Control
Conference.IEEE,2007:5406?5411.
27 劉新艷,黃顯林,吳強.國外任務規劃系統的發展[J].火力與指揮控制,2007,32(6):5?9.
28 陳炳峰.外軍任務規劃系統分析與啟示[J].艦船電子工程,2013,33(9):24?27.
29
ATKINSON M.Contract nets for control of distributed agents in unmanned
air vehicles[C]//Aiaa “Unmanned Unlimited”Conf.and
Workshop&Exhibit,2013.
30
MANYIKA J,CHUI M,BROWN B,et al.Big data:the next frontier for
innovation,competition,and productivity[J].Analytics,2011,4(8):15?18.
31 LABRINIDIS A,JAGADISH H V.Challenges and opportunities with big data[M].Stanbul:VLDB Endowment,2012.
32 肖利,王能斌,徐宏炳,等.挖掘轉移規則:一種新的數據挖掘技術[J].計算機研究與發展,1998(10):39?43.
33 BOGUE R.The role of arti fi cial intelligence in robotics[J].Industrial Robot,2014,41(2):119?123(5).
34 BARELLA A,VALERO S,CARRASCOSA C.Jgomas:new approach to AI teaching[J].IEEE Transactions on Education,2009,52(2):228?235.
35 羅翊,王克宏.基于歸納的機器學習方法的實現研究[J].計算機科學,1992(2):69-74.
36 閻明印,蔡振江,楊晶欒,等.適于專家系統的機器學習模型與過程[J].沈陽工業學院學報,1997(1):61?65.
37 段金菊,余勝泉.學習科學視域下的e-Learning深度學習研究[J].遠程教育雜志,2013(4):43?51.
38 鄢華.模糊深度學習網絡算法的研究[D].哈爾濱:哈爾濱工業大學,2012.
39 李明樹,唐朔飛,石東林,等.基于知識的機器人規劃系統KBROPS-2及其規劃結果的對比分析[J].模式識別與人工智能,1994(2):133?142.
40 朱戰霞,楊博,袁建平.人工智能在衛星任務規劃中的應用[J].飛行力學,2008(1):79?82.
原文鏈接:https://mp.weixin.qq.com/s/ih2fjba8Grk3nBj05hQ0RQ