![]()
以下文章來源于海鷹資訊 ,作者楊文鈺 李東兵等
引 言
導航技術已深入到人類生產生活的各個領域,其長期穩定地提供服務是國家正常運轉的重要保障。當前,衛星導航在各國具有全方位、多層次、寬領域的應用,其他自主導航方式處于輔助地位。然而,衛星導航存在其固有缺點:信號弱,且容易受到干擾和欺騙。為確保美國在定位、導航與授時(PNT)服務無法使用時,基礎設施仍能正常運轉,2020年2月12日,美國總統特朗普簽訂了《通過負責任地使用PNT服務增加國家彈性》行政令,希望通過備份路基的遠距離無線電導航系統(eloran)系統及加強慣性導航等資金投入,為國家PNT增加彈性。
2020年,在各國政府、公司和組織等的支持下,不依賴衛星的導航技術取得一定進展。本文對受到關注最多、應用領域最廣的慣性導航技術進展進行介紹,并總結視覺導航、天文導航、數據庫匹配導航、仿生導航、量子導航和協同導航在2020年的研究進展,以期為相關領域的研究提供參考。
NO.1
慣性導航
通過測量速度和加速度等參數,并對測得參數進行積分運算,慣性導航可以實時獲取物體的位置和速度信息。由于慣性導航系統(INS)通常內置在待測物體中,通過自身傳感器獲得待測信息,不依賴于衛星等外部條件,對外界變化不敏感。
近年來,隨著現代物理學、計算機技術、電子技術、先進微加工藝技術等現代科學技術的高速發展,慣性技術取得了一定的進步。
目前,慣性導航市場占據主導地位的研究機構有諾格公司、霍尼韋爾公司、賽峰公司、雷錫恩公司、L3 Harris公司等。KVH公司、iXblue公司、Civitanavi公司等也參與了競爭,但市場份額較小。2020年,未出現有競爭力的公司加入市場競爭,但隨著慣性技術涉及的技術領域進一步擴大,預計市場上還會從各個技術領域涌現出新的競爭者。
(1)精度要求引領著慣性元器件不斷進步,也同時推動了相關技術的發展。高精度慣性元器件使用的領域更加廣闊,同時,其體積和質量進一步減小。
2020年2月,慣性實驗室發布了其產品雙天線慣性導航系統(INS-DL)的研究報告。INS-DL可實現1cm的位置精度和0.05°的航向、俯仰和滾轉精度,可為OpenWorks工程公司反無人駕駛系統的SkyWall自動響應系統提供精確的位置和方向,使系統在高度動態的條件下也能正常運行。
2020年11月,慣性實驗室發布緊湊型工業級慣性測量單元(IMU)產品Kernel-100,其三軸微機電(MEMS)加速度計具有小于10 μg的偏置運行穩定性,三軸MEMS陀螺儀具有小于2 (°)/ h的偏置運行穩定性。借助連續的內置測試、可配置的通信協議、電磁干擾保護和靈活的輸入功率要求,Kernel-100可以集成到運動參考單元、AHRS,以及GPS輔助INS中。
2020年8月,VectorNav公司推出了其戰術嵌入式慣性系統產品,包括戰術級IMU和多頻段全球導航衛星系統(GNSS)輔助INS,如圖1所示。產品質量僅為15 g,結構緊湊,可提供毫弧度的姿態精度和厘米級的定位能力。應用程序包括框架式情報、監視和偵察(ISR)有效載荷、衛星通信系統、高精度激光雷達測繪和攝影測量。戰術嵌入式傳感器還支持用于ISR、電子戰、彈藥和無人機導航的外部防欺騙GPS模塊。

圖1 VectorNav公司的戰術嵌入式慣性系統產品
(2)體積、重量、功耗和成本等綜合性能不斷優化,加工工藝不斷提高。對于具體的慣性陀螺、加速度計等,研究進展體現在工藝的進步,品質因子的不斷提高以及抗沖擊、振動等力學性能的不斷提升。
2020年8月,SBG系統公司的Ekinox2-D雙天線GNSS輔助INS已集成到波蘭第一艘自主水文勘測無人水面艦艇(USV)中,設計用于大型船只難以或無法達到的水域進行水文測量。該產品尺寸、重量和功率(SWaP)低,占用空間小,擁有IP68防護等級的堅固外殼,可有效適用于空間受限、復雜的地形。
(3)INS與GNSS組合導航系統在精度、性能和可靠性等多個方面均優于單獨的子系統,具有良好的應用前景,根據政府采購和民用市場需求,各個公司不斷推出新產品,并對性能進行優化。
除前述VectorNav公司和SBG系統公司外,2020年4月,角斗士技術公司推出小型高性能GNSS/INS,高性能LandMark 60 INS/GPS(如圖2)和緊湊型LandMark 005 INS/GPS(如圖3)產品,均具有先進的傳感器融合技術,將GNSS位置數據與低噪聲、高輸出慣性傳感器以及氣壓計、磁力計結合在一起;均具有擴展卡爾曼濾波器,可在短期GPS中斷期間提供精確的位置信息,精度達2 nmile/h。

圖2 Landmark 60 GNSS/INS

圖3 Landmark 005 GNSS/INS
2020年5月,運動跟蹤模塊制造商Xsens公司集成了GNSS輔助INS的模塊,推出MTi-680G,如圖4所示。其集成內部實時運動(RTK)功能可將標準商用GNSS接收機中的最大定位誤差從±1 m降低到±2 cm,具有厘米級精確定位功能,包含RTK GNSS接收器以及同步的三維姿態和航向輸出。MTi-680G專為無人機、機器人和無人系統等應用設計,可提供高達400 Hz的全面定位和導航輸出。

圖4 MTi-680G
NO.2
其他導航
2.1視覺導航
視覺導航通過攝像機對周圍環境進行圖像采集、濾波和計算,完成自身位置確定和面向目標的路徑規劃,并做出導航決策。近年來,視覺導航提取圖像、無線電信號等環境信息進行分析,結合圖像數據、數字地形數據完成定位和路徑規劃,常用于輔助慣性導航。視覺導航的主要研究機構有Draper試驗室、噴氣推進實驗室、Autonomous System 實驗室、機器人感知試驗室、多自主機器人系統試驗室等。
2020年,視覺導航的研究進展主要體現在算法優化方面,算法的優化可提高視覺導航精度,增加不可見環境的導航成功率,增強了視覺導航的自主性。
2020年1月,加州大學圣塔芭芭拉分校、微軟雷蒙德研究院和杜克大學的學者研究了視覺語言導航任務中的三個關鍵問題:跨模態接地、不適定反饋和泛化問題。研究提出了一種強化跨模態匹配(RCM)方法。結果表明,RCM模型將SPL指標提高了10%。為提高學習策略的泛化性,研究進一步引入自我監督的模仿學習方法,減少了可見環境和不可見環境之間的成功率差距(從30.7%縮小到11.7%)。
2020年4月,無人機導航公司研發的視覺導航系統旨在減少航位推算導航中積累的位置誤差,該系統在實時飛行條件的初步測試中取得了成功。該系統可提高無GNSS信號的導航性能,總漂移小于行駛距離的1%,消除與時間相關的漂移。
2020年7月,Inertial Sense公司展示了其用于自主導航的Luna軟件平臺。Luna平臺可提供有關機器人位置、性能和路徑的高精度信息,可用于監視和控制單個機器人或整個車隊。Luna結合了來自各種傳感器(包括相機、INS和GPS)的輸入,并使用復雜的視覺處理、地圖繪制和對象檢測算法來提供精確導航,路徑和圖案跟隨精度為6~10 cm。
2.2數據庫匹配導航
在數據庫匹配導航方式中,各類基礎數據預先存儲于設備中,傳感器感知到的各類信息與預先存儲的數據進行比較,得到導航與定位信息。通過計算機的內置匹配算法來實現數據的比較。因此,數據庫匹配導航的精度依賴于傳感器感知、基礎數據庫數據以及匹配算法。按照數據庫類型,數據庫匹配導航包括地磁匹配、重力匹配、地形匹配、景象匹配等。
數據庫匹配導航的主要研究機構有Draper試驗室、美國宇航局(NASA)、慣性試驗室、Micro-G Lacoste公司等。
2020年,地形匹配技術應用領域進一步擴大,成功提高了NASA的火星車在選點降落過程中的定位精度,地磁匹配導航技術的精度進一步提升,已達到略低于衛星導航定位的精度。
2020年2月,NASA毅力火星車搭乘阿特拉斯-5型運載火箭發射升空,在著陸與探測任務中,利用地形匹配導航技術,毅力號將實時地形圖與預存的地圖進行比較,以確定降落點周圍的環境,躲開降落過程中可能遇到的陡坡和大型巖石。在之前的任務中,根據深空網絡提供的數據,初步估算其相對于地面的位置,估算誤差約為1~2 km,在進入大氣期間估算誤差增長到約2~3 km。利用地形相關導航技術,毅力火星車利用降落傘降落,穿越火星大氣時估算自己的位置,定位精度可達60 m。
2020年8月,美空軍地磁導航技術取得進展。美國空軍聯合麻省理工學院,研究利用地球磁場為飛機等軍用載具提供導航。研究結果顯示,地磁導航定位精度可精確至10 m,略低于GPS的3 m精度。但相比GPS,地磁導航的信號非常穩定,被干擾可能性低,更不可能被摧毀。聯合研究團隊中的戴維·雅各布空軍少校稱,只有核爆炸規模的干擾才能影響到地磁信號。
2.3仿生導航
仿生導航即模仿生物導航的機理,涉及生命認知科學以及相關算法。相應地,仿生導航研究方向分為仿生傳感器技術與仿生導航算法。2020年,光學、聲學原理的仿生傳感器有所突破,作為仿生導航難點的算法尚無重大進展。仿生導航的主要研究機構有法國國家科學研究中心、英國帝國理工大學、美國波士頓大學、澳大利亞國立大學、印度國家技術研究所等。
仿生傳感器主要有仿生光羅盤、仿生磁羅盤、仿生眼和仿生聲吶等。2020年,仿生光導航和仿生聲吶均取得進展。2020年1月,波士頓大學研究團隊在《PLoS Computational Biology》期刊上發表了其對閉環虛擬森林中鷹蛾飛行軌跡的研究。研究表明,飛蛾在很大程度上依靠光流來導航,而不是明確觀察場景中各種障礙物的位置,飛蛾的導航策略可以用于設計無人機控制策略。
仿生聲吶方面,2020年1月,美國《國家科學院學報》刊載了來自德國埃爾蘭根-紐倫堡大學、比利時安特衛普大學和荷蘭阿姆斯特丹大學的研究成果。研究團隊開發出了一種由蝙蝠式聲吶傳感器和花卉式聲吶反射裝置組成的仿生聲吶系統,并在原理驗證試驗中演示了它們的功能。結果顯示,花卉式聲吶反射裝置可以提高蝙蝠式聲吶傳感器引導機器人的導航效率,即使在復雜環境中,傳感器也能可靠地檢測到這些反射裝置。
2.4量子導航
量子導航可以分成無源導航和有源導航兩種。由于量子有源導航的定位過程通常使用衛星作為信號源,本文主要研究使用量子傳感器設備進行定位的量子無源導航系統。
量子無源導航系統中,量子導航傳感器、計時器是核心模塊,它們的性能直接影響系統的導航能力。2020年8月6日,由伯明翰大學領導的英國量子技術中心傳感器與授時領域的研究人員設計一種使量子傳感系統小型化的方法,使用光學超表面來減少激光傳輸系統的尺寸,其介電超表面光學芯片冷原子裝置如圖5所示,該研究發表于《科學進展》。
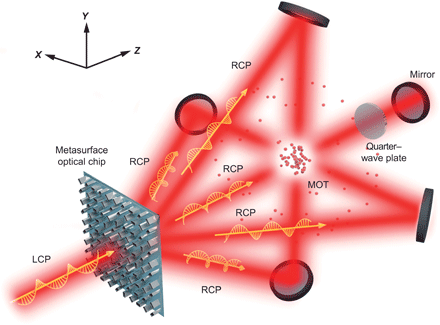
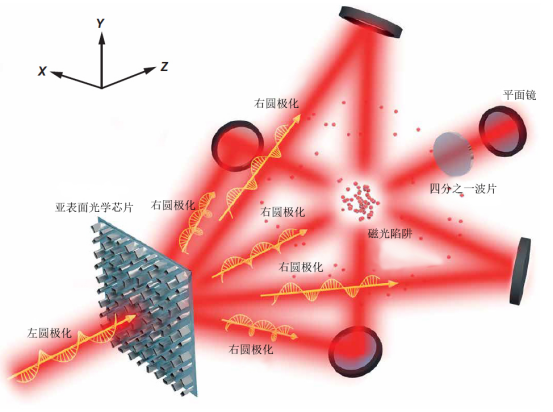
圖5 介電超表面光學芯片冷原子裝置示意圖
2020年1月,澳大利亞的Q-CTRL公司和Advanced Navigation公司建立了合作伙伴關系,從2020年7月起,這兩個組織將進行聯合技術開發,以支持量子傳感領域的合作研究與開發以支持民用和國防市場,重點是量子增強的精確導航和授時。2020年8月,美空軍研究試驗室在Beta SAM網站上發布消息稱,試驗室將制定空軍的量子信息科技戰略,重點是開發、演示和部署量子系統。其應用的關鍵領域包括計算,傳感通信,網絡以及定位,導航和授時。
量子磁力計的發展尤其受到國外研究機構重視。2020年4月,美國市場調研公司發布了第一份分析量子磁力計市場的行業分析報告《量子磁力計全球市場:2020~2029年》。報告研究了驅動量子磁力計市場的技術和市場因素。公司認為,在醫學、軍事和地球物理應用方面,到2025年,市場份額預計會增長到7億美元以上。2020年5月,美國空軍研究試驗室4位研究員成立小組以尋找用于磁力計的量子材料。目前,研究試驗室正資助麻省理工學院林肯試驗室研究磁力計的原型。電子工程師邁克爾博士表示,他們希望在2021年演示原型設備。
2.5協同導航
隨著飛行器編隊、機器人編隊等執行任務的優勢日益突出,協同導航成為研究熱點。協同導航的研究可以大致分為兩個領域,導航方法和協同方式。
導航方法的發展主要依賴于各細分技術領域的研究進展,即本章其他小節涉及技術的進步以及第一章慣性導航技術的發展。協同方式的研究重點在于初步自組網完成之后,根據環境和任務的變化,系統不斷改變編隊方式,保證后續任務高效完成。2020年,協同方式的研究重點是降低成本、提高效率。
2020年3月,新加坡科技設計大學、莫拉圖瓦大學和南洋理工大學的研究人員開發了一種協同同步定位與構圖技術,該技術利用低成本和低計算量的傳感器,借助現代建筑物通常具有Wi-Fi網絡覆蓋實現導航。2020年5月,德國Weimar Bauhaus大學的研究者通過改進多射線跳躍技術將導航對象分為兩個分布式團隊,提高了協同導航效率。
NO.3
導航技術未來發展方向分析
3.1深海導航技術不斷深入發展
深海感知、導航技術的發展具有較大發展空間。未來,結合光學陀螺儀、無線電羅盤、聲吶等多學科導航技術的深海導航將成為重點關注領域。
DARPA啟動于2019年的垂釣者(Angler)項目旨在研發水下機器人系統,這些機器人可在黑暗、湍流海況下執行搜索、維修等任務,其關鍵技術挑戰包括高分辨率傳感技術、未知參數物體的感知和操縱策略,以及長時間自主控制方法。2020年,該項目從設計階段進入測試階段,其機器人子系統在實驗室和仿真環境中進行測試。該項目預期在2021年在具有代表性的海洋環境中完成機器人集成系統的封裝測試。
3.2人工智能技術在導航系統中將占據重要地位
未來,以人工智能為核心、智能傳感器系統為先導的智能導航技術將為航空航天、兵器船舶等提供更加便利的導航定位選擇。智能導航的研究領域主要包括智能感知和智能輔助決策算法。
技術應用方面,智能導航在感知方面分成語音和視覺兩個方向。2020年初,TNAV公司擴大與亞馬遜合作,能夠實現通過Alexa語音進行導航,在接收質量差或沒有信號的地方為駕駛員提供了智能導航。2020年4月,韓國最大的造船廠現代重工集團宣布,已成功在25t散貨船上安裝了現代智能導航輔助系統(HiNAS)。智能感知方面,仍需重點突破精確感知機理、點云無縫融合等關鍵技術。
公司人事調動方面,2020年1月,BAE系統公司任命Ravi Ravichandran博士為公司情報與安全部門的副總裁兼首席技術官,將專注于擴展在人工智能/機器學習、云計算、數據分析、企業IT現代化和系統維護方面的前沿技術。這一任命體現了BAE公司對前沿技術輔助導航系統未來應用的提前布局。
3.3室內導航技術應用不斷普及
在未來,智能城市的實現離不開室內導航技術的輔助,室內導航定位技術的應用將隨著其重要性的提高而逐漸得到普及。發展精度性高、成本低、普適性的室內導航定位技術始終是國外研究的重點與難點。
2020年8月,印度基礎設施技術研究與管理研究所提出了一種基于接收信號強度指數(RSSI)的機器人定位、路徑規劃和計算機視覺決策系統,采用的無線局域網發射設備具有固定的發射功率,接收端根據周圍環境得到不同的信號強度值。該方法每1.6m測量3個固定發射單元的RSSI值,并通過分類器進行分析,實現機器人在室內區域的定位。導航完成后,機器人分別利用目標識別和基于人臉識別的分類方法對目標進行分析。
2020年8月,德國德累斯頓工業大學提出了基于粒子濾波的四錨節點三維時差定位方法,研究了基于四錨點到達時差(TDoA)的粒子濾波三維定位問題。所實現的粒子濾波器使用1000個粒子來表示感興趣的概率密度函數。在預測步驟中,使用重采樣過程生成粒子,TDoA測量用于確定每個粒子的權重,以更新后驗概率密度函數和估計目標節點的位置。
3.4微小飛行器導航技術向自主化、智能化發展
微小型飛行器的飛行環境主要集中于幾百米之內的低空室外環境以及復雜的室內環境。在室內環境下,物品擺放使得結構布局復雜,飛行空間不規則;在室外環境下,存在固定障礙如建筑、電線,也存在隨機出現的障礙如行人、車輛等,飛行環境復雜程度進一步提高。
由于微小型飛行器的飛行環境復雜,環境感知能力、飛行安全性與可靠性是技術研發的重要內容。此外,微小型飛行器的工作場景往往使得單一的導航方式受限,高大建筑群使得衛星導航方式受限,氣候發生變化,如發生溫度變化,光照變化,氣流擾動時,容易使接收響應信息的傳感器受到影響,單一的定位導航方式難以滿足其在復雜飛行環境下可靠穩定工作的需求,所以實時準確的估計微小型飛行器在復雜環境中的位姿問題是飛行器穩定工作的重要保障。
綜合可見,微小型飛行器環境感知及自主導航技術是其具備自主避障,目標跟蹤,路徑規劃等功能的重要前提,是其完成如自主偵察,環境探測等更復雜,更多樣任務的重要保證,是微小型飛行器自主化,智能化的關鍵。
美國海軍研究實驗室研制出了近身隱蔽式自主一次性飛機微型無人滑翔機的最新變種蟬mk5。已經為蟬mk5開發了導航、制導和控制系統,能夠實現從發射到著陸的全自動飛行。2019年11月,美國國防部美國海軍研究實驗室Kahn等人在《Journal of guidance, control, and dynamics》期刊上介紹了導航系統的設計,該系統利用三軸速率陀螺儀和全球定位系統接收機提供的信息來估計位置、速度、偏差修正后的體軸角速率、橫搖姿態、風速和風向。該系統設計能夠跟蹤到預先編程的目標位置,環繞該位置運行,并在該位置執行精確著陸。論文同時介紹了控制滾轉姿態和飛行軌跡角的控制器,包括用于恢復蟬mk5在空中部署期間意外旋轉的技術;給出了飛行試驗結果,驗證了蟬mk5在飛行和精確著陸過程中的飛行剖面。
結束語
不依賴衛星的導航技術日益成為各國發展的重點。當前,世界軍事大國均已基本完成衛星導航系統設施部署,且都基本具備了干擾他國衛星信號的能力。下一階段,在不斷完善衛星導航系統的同時,不依賴衛星的導航系統研發成為工作重點。由于PNT領域對于國計民生的重要意義,美國已連續發布相關領域的頂層設計規劃,俄羅斯、歐盟等也紛紛啟動相關項目,但項目總投入與美國差距仍然較大。
針對不同的應用領域和使用環境,以慣性導航為主,視覺導航、協同導航等輔助導航方式不斷取得進展,各項性能參數不斷提高,應用領域不斷擴大,為飛行器、車輛等提供了導航多樣化選擇。量子導航、仿生導航等尚處于實驗室研發階段的導航技術產品也初露端倪,具備未來應用的巨大潛力。
原文鏈接:https://mp.weixin.qq.com/s/YWE03VJjjYrOQsjKlfPP8A